Improving Object Grasp Performance via Transformer-Based Sparse Shape Completion
Abstract
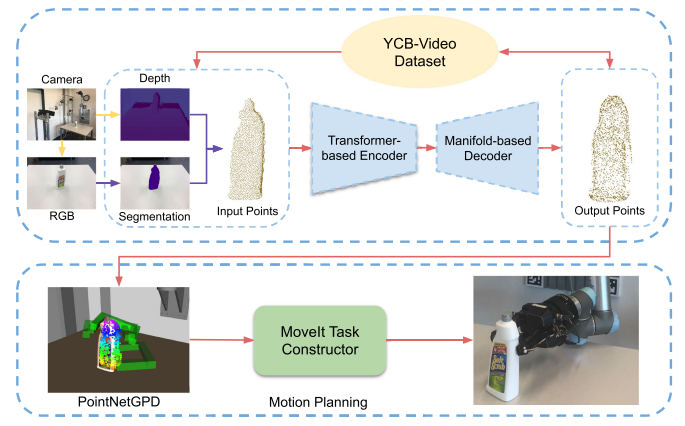
Currently, robotic grasping methods based on sparse partial point clouds have attained excellent grasping performance on various objects. However, they often generate wrong grasping candidates due to the lack of geometric information on the object. In this work, we propose a novel and robust sparse shape completion model (TransSC). This model has a transformer-based encoder to explore more point-wise features and a manifold-based decoder to exploit more object details using a segmented partial point cloud as input. Quantitative experiments verify the effectiveness of the proposed shape completion network and demonstrate that our network outperforms existing methods. Besides, TransSC is integrated into a grasp evaluation network to generate a set of grasp candidates. The simulation experiment shows that TransSC improves the grasping generation result compared to the existing shape completion baselines. Furthermore, our robotic experiment shows that with TransSC, the robot is more successful in grasping objects of unknown numbers randomly placed on a support surface.